Emotion recognition of speech signals
Rohan Joseph D’Sa
Department of Computer Science
Esslingen University of Applied Sciences
Written at Sony International (Europe) GmbH
Sony Corporate Laboratories Europe
01/09/2002 to 15/01/2003
Supervisor at Esslingen University of Applied
Science: Prof. Dr. Ulrich Broeckl
Supervisor
at Sony: Senior Scientist, Raquel Tato
Certification of authenticity
“I hereby declare that I have written the
attached work alone and without any other reference works than those mentioned.
All thoughts or quotations taken directly or indirectly from other sources have
been noted as such. Furthermore, I have not used this work, parts of this work
or basic ideas from this work to achieve credits in any academic course at any
time.“
(Rohan Joseph D’Sa)
Acknowledgements
I would like to take this opportunity to thank
my university supervisor, Prof. Dr. Ulrich Broeckl for having accepted the
thesis subject and for his constant support and encouragement in improving the
standard of this documentation.
I would also like to thank Raquel Tato, my
supervisor at Sony for giving me the opportunity to be a part of this
prestigious project. She has always provided me with ideas, suggestions and
support during this thesis. Rocio Santos, who was an invaluable help during the
first month of my thesis.
I would also like to thank all my colleagues in
the Man Machine Interface lab for from whom I have learnt so much during this
period especially Holger Geisen, Martin Barbisch and Toni Abella. Jürgen
Schimanowski for his help during the demonstration.
Last but not the least, I would like to thank
God and my parents for supporting me through my entire studies in Germany and
without who I would never be.
Abstract
This
thesis addresses the issue of recognizing the emotional state of a person
solely based on the acoustic properties extracted from speech signals. From a
psychological perspective, emotion can be modeled in a two-dimensional space
consisting of activation level or how strong or weak the emotion is and
evaluation level or how positive or negative the emotion is. There is
conclusive evidence pointing towards the existence of two independent acoustic
co-relates for these dimensions. These are statistically based acoustic
features extracted from speech signals called prosody for the activation level
and voice quality features for the evaluation level. Psychological research
points towards an increase in speaker independent emotion discrimination by
listeners on certain phonemes of the phonetic spectrum, namely the vowel
regions [a] and [i]. It has been hypothesized that the acoustic properties from
these regions contribute to this increased emotion discrimination. The unique
characteristics of formants in vowel regions play an important role in the
identification of these regions. Emotions are categorized by feeding voice
quality features extracted from these regions into an automatic classifier like
artificial neural networks. Initial experimental tests have successfully
pointed to a steep increase in emotion discrimination on implementation of the
hypothesis. The long-term motivation is to build a speaker independent emotion
recognition system capable of being used in a live environment. The target
scenario would be its application into future generations of the Sony
entertainment robot AIBO.
Chapter 1
“The question is not whether intelligent
machines can have any emotions, but whether machines can be intelligent without
emotions“
[Min85]
“Emotion is that which leads one's
condition to become so transformed that his judgement is affected, and which is
accompanied by pleasure and pain. Examples of emotions include anger, fear,
pity and the like, as well as the opposites of these.”
Aristotle (384-322 BC)
Man is living in a world where interaction with
machines is on the increase. An increasing number of people spend more time in
front of a computer than with a fellow human being. Human-computer interaction
has been found to be largely natural and social. Imagine someone who works in
an environment where this is no emotion but his or her own. The long-term
influences of interacting with ineffective computers may in fact be gradually
eroding the user’s emotional abilities [Ro 1998].
Hence the greater need for emotion
computing is not the need to improve the intelligence of the computer as much
as to facilitate the natural abilities of the user.
It is no longer accurate to think of emotion as
some kind of luxury when instead emotions play an important role in cognition
and Human-computer interaction. Computers do not need affective abilities for
the trivial and fanciful goal of becoming humanoids, but they are need for a
meeker and more practical goal: to function with intelligence and sensitivity
toward humans.[Ro 1998]
Emotion dimensionality is a
simplified description of basic properties of emotional states. According to
Osgood, Suci and Tannenbaum’s theory [Osg57]
and subsequent psychological research (s. [Alb74],
[Dat64]),
the communication of affect is conceptualized as three-dimensional with three
major dimensions of connotative meaning, arousal,
pleasure and power.
To elucidate further on how emotions
can be modeled in 3 dimensions,
as a person goes through her daily activities,
every action she performs is associated with an underlying emotion. Thus, for
instance, when she is asleep, the prevailing emotional condition is one of low arousal (i.e., low physical
activity and/or low mental alertness, with slight increases in arousal during
REM sleep). While breakfasting, she enjoys jolts of arousal from the coffee or
tea or the heat in the food she consumes while also experiencing pleasure (if the breakfast foods are
interesting and tasty) and dominance/power
(if she has control over her choices of breakfast items). If she has to take a
crowded, noisy, and dirty bus to work, then she experiences discomfort,
distress, or even anxiety. When she encounters her best friend as she enters
her workplace, she experiences momentary elation until she enters her office
and is reminded of an unfinished task that is way overdue which results in
feelings of unease.
The following extract as quoted by Rocio Santos, gives some general
definitions of the dimensions emotion.
- Activation or Arousal Refers to the degree of intensity of the affect and ranges “from
sleep to frantic excitement” [Pit93]. It is also related to the degree of readiness to act. Activation dimension
differentiates, for instance, anger
from boredom. While the first
one possess a high activation level, the last one presents lower
disposition to act, and therefore lower activation level.
- Evaluation or Valence Determines how positive or negative,
liking or disliking the affect is. For instance, happy is considered to be positive, i.e. it has a high
evaluation level, while angry presents
a negative value, i.e. low evaluation level.
- Power or Control Relates to the degree of power or sense of
control over the affect, and helps distinguish emotions initiated by the
subject from those elicited by the environment e.g. contempt versus fear.
It is also related to the degree of dominance/submission.
In this section, the entire outline of the
document will be described according to each chapter.
- Chapter
2 Emotion recognition Basics
gives a short summary of current research trends in the field of emotion
recognition.
- Chapter
3 Voice Quality Features
describes how emotion may be recognized well in certain phonetic sections
of speech. The hypothesis proposed by Alison tickle suggests that emotions
may be better recognized in [a] and [I] regions.
- Chapter
4 Experiments on prosodic
features gives details on how system responds with noise mixed into the
data.
- Chapter
5 Experiments on voice quality
features gives details on how emotion recognition may be increased in [a]
and [I] regions.
- Chapter
6 Conclusions.
- Praat: This is a freeware scripting
language program developed by Dr. Paul Boersma and David Weenink,
Institute of Phonetic sciences at the University of Amsterdam. The
software is a research, publication, and productivity tool for
phoneticians. Praat has been used to calculate the voice quality features.
- C Programming language has been used to calculate the
prosodic features, calculation of voiced/ unvoiced region.
- SNNS – Stuttgart Neural Network
simulator is a
research program developed at the University of Stuttgart and currently
managed by the University of Tübingen. This software has been used in
classifying the emotion category according to the input prosodic and voice
quality features. Modules in SNNS such as “batchman” scripts, which act as
interface to the SNNS kernel can be embedded in Perl programs for
creating, testing, training and pruning Neural networks and “snns2c” which
converts a neural net into a C program.
- Unix shell scripting has been used in batch
processing several Perl programs.
- Perl scripting language has been useful in
manipulating file contents and embedding batchman scripts of SNNS.
Chapter 2
This chapter gives an introduction
to the state of the art in emotion recognition theory. The present system stems
from research inputs from varied sources due to papers and hypothesis presented
by psychologists, linguists, and research in the field of neural networks and
other classifiers.
Section 2.1 gives a brief
psychological perspective called the Activation-Evaluation hypothesis on how
emotions can be modeled using a two dimensional space where one dimension
represents the strength of the emotion and the other represents how positive or
negative the emotion is.
Section 2.2 describes the classifier
used in this thesis, which takes as input the features extracted according to
the activation – evaluation hypothesis from an utterance and outputs what it
thinks as the emotion expressed by the speaker.
From the current psychological
hypothesis, activation-evaluation space represents emotional states in terms of
two dimensions. Activation measures how dynamic the emotional state is. For
instance, exhilaration involves a very high level of activation; boredom
involves a really low one.
Evaluation is a global measure of
the positive or negative feeling associated with the emotional state. For
instance happiness involves a very positive evaluation; Despair involves a very
negative one. The circumference is defined by states that are at the limit of
emotional intensity. These are equidistant from an emotionally neutral point
i.e. they define a circle, with alert neutrality at the center.
Figure 2‑1 FeelTrace Display as extracted from the publication [Rod 00]
Emotion is an integral component of
human speech, and prosody is the principle conveyer of the speaker’s state and
hence is significant in recovering information that is fundamental to
communication.
The acoustic prosodic features are signal-based attributes that usually
span over speech units that are larger than phonemes (syllables, words, turns,
etc). Within this group two types can be further distinguished:
·
Basic prosodic features are extracted from the pure signal
without any explicit segmentation into prosodic units. These features are not
normally used directly for prosodic classification; instead, they are the basis
to calculate more complex prosodic features.
·
Structured prosodic features can be seen as variations of basic
prosodic attributes over time. Consequently, they are computed over a larger
speech unit. Structured prosodic features can derive from the prosodic basic
features or can be based on segmental information provided e.g. from the output
of a work recognizer.
Energy is
the acoustic correlated of loudness.
In terms of global statistics, energy is proved to be higher in emotions whose
activation is also high. On the contrary, low energy levels of energy are found
in emotional states with a low activation value.
The acoustic correlate of pitch is the fundamental frequency or F0.
Fundamental frequency is considered to be one of the most important attributes
in emotion expression and detection (s. [Mon02, Abe01]). From the pitch contour
of one utterance we extract the mean, maximum, minimum, variance and standard
deviation among other features.
Till date, abundant research in the
field relating Prosody has been conducted. However due to conclusions derived
from previous experiments, it can be evinced that Prosody cannot independently
exist as the sole basis for an effective classification of emotions. From the
hypothesis of Activation-Evaluation space theory it is further hypothesized
that the acoustic correlate of the activation level is Prosody. This can be
proven by the fact that during prosodic experiments, the confusion between
emotions such as angry and happy or bored and sad was very high. From Figure 1,
it is clearly discernible that angry and happy are having similar values on the
activation axis.
From section 2.1, it is clear that
there must be another contributing factor to further the differentiation
between some emotions. It has been further hypothesized that this other factor,
the acoustic correlate of the Evaluation dimension is Voice Quality.
In the real world we are confronted
with so many systems, which cannot be possibly modeled by a simple series of
mathematical equations. These systems do not have a clear-cut decision rule
although it is easily conceivable that a relationship must exist between the
input and output of the system. Examples of these non-determiNISTic systems
range from weather prediction, voice recognition and face recognition systems. Wall Street has always looked for
methods or systems to find relationships between price movements and economic
indicators in the marketplace.
The application of neural networks
in these non-determiNISTic systems has met with considerable success and it has
shown that they can best model these unknown and abstract functions.
Figure 2‑2 Schema of a
non-determinate system
The
present application of emotion recognition is a typical example of a
non-determiNISTic system wherein an unknown relationship exists between
prosodic and voice quality features (input) and emotions (output). We use the
artificial neural network to bridge the gap between the prosodic and quality
features and emotions.
An artificial neural network (ANN)
is an information-processing paradigm inspired by the way the densely
interconnected, parallel structure of the mammalian brain processes
information. Artificial neural networks are collections of mathematical models
that emulate some of the observed properties of biological nervous systems and
draw on the analogies of adaptive biological learning.
The artificial neuron has two modes
of operation: the training mode and
the using (testing) mode. In the
training mode, the neuron can be trained to fire (or not), for particular input
patterns. In the using mode, when a taught input pattern is detected at the
input, its associated output becomes the current output. If the input pattern
does not belong in the taught list of input patterns, the firing rule is used
to determine whether to fire or not. [San02]
A neural network is characterized by its
particular:
·
Architecture: The pattern of connections between the
neurons.
·
Learning Algorithm: The method used to determine the weights on
the connections.
·
Activation
function: The method used to evaluate the output of the neural network. The
most common activation functions are step, ramp, sigmoid and Gaussian function.
The NN
models used in this thesis are the Backpropagation Networks including Vanilla
Backpropagation and Backpropagation with Chunkwise update and resilient
Backpropagation. The description of the following passages has been extracted
from the Stuttgart Neural network simulator manual.
2.2.3.1 Backpropagation learning algorithm.
The
basic idea of Backpropagation learning algorithm, is the repeated application
of the chain rule to compute the influence of each weight in the network with
respect to an arbitrary error function E:

 (2.1)
(2.1)
Where
wij = weight from neuron j to neuron i.
ai = activation value.
neti =
weighted sum of the inputs of neuron i.
Once the
partial derivative of each weight is known, the aim of minimizing the error
function is achieved by performing a simple gradient descent:
 (2.2)
(2.2)
Where,
η = learning rate.
The user
selects learning rate parameter and, as it can be deduced from equation 2.2, it
plays an important role in the convergence of the network in terms of success
and speed. For the experiments in the following chapters the most commonly used
parameters are selected.
The
Backpropagation weight update rule, also called generalized
delta-rule, for the SNNS software reads as follows:
 (2.3)
(2.3)
 (2.4)
(2.4)
Where
η = learning factor (a constant).
δj = error (difference between the
real output and the teaching input) of unit j.
oi = output of the preceding unit i.
tj = teaching input of unit j.
i = index of a predecessor to the current unit j with link wij
form I to j.
j = index of the current unit.
k = index of a successor to the current unit j with link wjk
from j to k.
There are several Backpropagation algorithms
supplied. The following research makes use of three of the common algorithms.
These are as follows
2.2.3.2 Vanilla Backpropagation / Standard Backpropagation
Vanilla Backpropagation corresponds
to the standard Backpropagation learning algorithm described above. It is the
most common learning algorithm. In SNNS, one may either set the number of
training cycles in advance or train the network until it has reached a
predefined error on the training set. In order to execute this algorithm, the
following learning parameters are required by the learning function that is
already built into SNNS.
- η:
Learning rate specifies the step width of the gradient descent. Typical
values of η are 0.1 …1. Some small examples actually
train even faster with values above 1, like 2.0.
- dmax: the maximum difference
 between a teaching value tj
and an output oj of an output unit which is
tolerated, i.e. which is propagated back as dj=0. If values above 0.9 should be
regarded as 1 and values below 0.1 as 0, then dmax should be set to 0.1. This prevents over training
of the network. Typical values of are 0, 0.1 or 0.2.
between a teaching value tj
and an output oj of an output unit which is
tolerated, i.e. which is propagated back as dj=0. If values above 0.9 should be
regarded as 1 and values below 0.1 as 0, then dmax should be set to 0.1. This prevents over training
of the network. Typical values of are 0, 0.1 or 0.2.
2.2.3.3 Backpropagation with Chunkwise
update
There is a form of Backpropagation
that comes in between the online and batch versions of the algorithm with
regards to updating the weights. The online version is the one described before
(vanilla Backpropagation). The batch version has a similar formula as vanilla
Backpropagation but, while in Vanilla Backpropagation an update step is
performed after each single pattern, in Batch Backpropagation all weight
changes are summed over a full presentation of all training patterns (one
epoch). Only then, an update with the accumulated weight changes is performed.
Here, a Chunk is defined as the
number of patterns to be presented to the network before making any alterations
to the weights. This version is very useful for training cases with very large
training sets, where batch update would take too long to converge and online
update would be too unstable.
Besides parameters required in
Vanilla Backpropagation, this algorithm needs to fix the Chunk size N, defined as the number of patterns to be
presented during training before an update of the weights with the accumulated
error will take place. Based on this definition, Backpropagation with Chunkwise
update can also be seen as a mixture between Standard Backpropagation (N =1)
and Batch Backpropagation (N =number of patterns in the file) For the
experiments carried out in this thesis, which make use of this learning
algorithm, the Chunk size is set to 50 patterns.
2.2.3.4 RPROP learning algorithm.
Rprop stands for “Resilient back propagation” and is a local adaptive learning scheme, performing
supervised batch learning in multi-layer perceptrons.
The choice of the learning rate η for the
Backpropagation algorithm in equation 2.3, which scales the derivative, has an
important effect on the time needed until convergence is reached. If it is set
too small, too many steps are needed to reach an acceptable solution; on the
contrary a large learning rate will possibly lead to oscillation, preventing
the error to fall bellow a certain value. Figure 2.3 shows both phenomena. In
case (a), long convergence times are required, and in the (b) case, an
oscillation can be seen in the proximity of local minima.
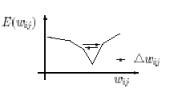
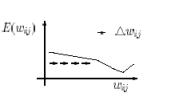
(a) (b)
Figure 2‑3 Error functions for the case
of (a) a small learning rate and (b) a large learning rate.[San02]
The basic principle of Rprop is to eliminate the harmful influence of
the size of the partial derivative on the weight step. This algorithm considers
the local topology of the error function to change its behavior. As a
consequence, only the sign of the derivative is considered to indicate the direction of the weight update. The size of the weight change is exclusively
determined by a weight-specific, so-called 'update-value'  .
.
 (2.5)
(2.5)
Where
 = Summed gradient information over
all patterns of the pattern set.
= Summed gradient information over
all patterns of the pattern set.
The basic idea for the improvement realized by the Rprop algorithm was
to achieve some more information about the topology of the error function so
that the weight-update can be done more appropriately. Each ‘update-value’
evolves during the learning process according to its local sight of the error
function E. Therefore, the second step of Rprop learning is to determine the
new update-values. This is based on a sign-dependent
adaptation process:
 (2.6)
(2.6)
Note that the update-value is not influenced by the magnitude of the
derivatives, but only by the behavior of the sign of two succeeding
derivatives. Every time the partial derivative of the corresponding weight changes its sign, which indicates
that the last update was too big and the algorithm has jumped over a local
minimum (figure 6.5a), the update-value  is decreased by the factor η-. If the derivative retains its
sign, the update-value is slightly increased in order to accelerate convergence
in shallow regions.
is decreased by the factor η-. If the derivative retains its
sign, the update-value is slightly increased in order to accelerate convergence
in shallow regions.
Chapter 3
„Voice quality is the characteristic auditory coloring
of an individual's voice, derived from a variety of laryngeal and
supralaryngeal features and running continuously through the individual's
speech. The natural and distinctive tone of speech sounds produced by a
particular person yields a particular voice.“
Trask (1996:381) [Tra96]
The
following passages, which have been extracted from [Mar97] [San02], are first presented to give a brief understanding of the relation
between Voice quality features and emotions.
The
source-filter theory of speech production hypothesizes that an acoustic speech
signal can be seen as a source signal
(the glottal source, or noise generated at a constriction in the vocal tract), filtered with the resonance in the
cavities of the vocal tract downstream from the glottis or the constriction.
Figure 3.6 shows a schema of this process for the case of voiced speech
(periodic source signal).
Figure 3‑1
Source filter model of speech production
Voiced sounds consist of fundamental frequency
(F0) and its harmonic components produced by vocal cords (vocal folds). But not
only the source participates in the speech generation process, also the vocal
tract, which acts as a filter (see
figure 3), modifies this excitation signal causing formant (pole) and sometimes
anti-formant (zero) frequencies [Wit82]. Human perceptual system translates
patterns of formant frequencies into specific vowels. Each formant frequency
has also amplitude and bandwidth and it may be sometimes difficult to define
some of these parameters correctly. The fundamental frequency and formant
frequencies are probably the most important concepts in speech processing in
general.
With
purely unvoiced sounds, there is no
fundamental frequency in the excitation signal and therefore no harmonic
structure either, and the excitation can be considered as white noise. The
airflow is forced through a vocal tract constriction, which can occur in
several places between glottis and mouth.
To
bring the reader to a closer understanding of the relationship between formant
characteristics and emotions An extract from Alison Tickle highlighting “To what extent vocalization of emotion is
due to psycho-biological response mechanisms and is therefore quasi-universal
and to what extent it is due to social convention” will be summarized. The
experiment has been conducted with regards to emotion vocalization and
recognition, of English and Japanese speakers.
This will be followed by the
methodology behind practical implementation of conclusions derived from this
paper. For this a slightly deeper understanding of vowels as a function of
formants will be needed. This is followed by a brief explanation of the
algorithm to detect [a] and [I] regions.
A summary of the psychological study
conducted by Alison Tickle[Tik00]
and its conclusions are presented. The study used non-sense utterances,
phonotactically possible in both languages. These permit more cross-language
consistency, avoid problems with translation and give no verbal cues. In the present study, non-sense utterances
were composed allowing the influence of vowel quality to be highlighted as well
as to be compared cross-culturally. Only hypotheses relevant to my thesis and
based on previous research were made in relation to the decoding experiment and
are explained as follows:
- Happy
will be least accurately decoded when it is encoded on the utterance
containing [a] vowel quality compared to [i] or [u] Bezooijen [Bez84] suggests that happy may be easy to detect on [i] saying that
extra lip spreading due, for example to smiling, is easier to detect in
unrounded vowels. This study attempts to investigate this further by
controlling for vowel quality on non-sense utterances tested on native
speakers of unrelated languages.
- Angry
will be most accurately decoded when encoded on [u] and least accurately
decoded on [i]. This hypothesis is based on research by Ohala [Oha84] suggesting that the technique of vocal tract lengthening, thereby
signaling a larger sound source, is used by certain animals, when
expressing anger or aggression and since [u] necessitates a lengthening of
the vocal tract, it is a more likely to be used sound symbolically, to
suggest aggression or anger.
3.2.1.1
Encoding
Experiment
8 Japanese and 8 English female
university students aged between 18 and 35 encoded the data based on visual
aids consisting of eight quasi-universally recognized facial expression
photographs. The reason for this approach is twofold in that it focuses
attention upon emotions to be considered primarily via a visual stimulus, which
is common to both language groups and concentrating on the photograph and
imitating the facial expressions was found to be a useful stimulus.
3.2.1.2
Data
Decoding Experiment
Data
from the three most reliable speakers of each language was used in a forced
judgment-decoding test. The total number of items presented to decoders
included 90 items (3 speakers x 2 languages x 5 emotions x 3 vowel qualities)
3.2.1.3
Data
Decoding Procedure
16
English subjects (12 female and 4 male) and 8 Japanese subjects (4male and 4
female) performed a forced judgement-decoding test on the edited data described
above. Judges were offered 5 emotion words in their native language from which
to choose a single response.
3.2.1.4
Results
Figure 3‑2, show confusion matrices for English For each Table,
the emotions portrayed (English and Japanese) are indicated along the first
column and the possible decoding responses are shown across the top row.
Abbreviations are used representing English emotion words, the English
translations of which are happy (H), sad (S), angry (A), fearful (F)
and calm (C).
From the confusion matrices given below it can be evinced that
English subjects most accurately decoded emotions
encoded by English subjects on [i], then [a] then [u]. Subjects slightly more
accurately decode happy on [i]
supporting Bezooijen’s suggestion: see the second hypothesis. Interestingly,
subjects are also most likely to categorize vocalizations overall as happy when they are encoded on [i]. They
are least likely to categorize vocalizations overall as sad on [i] than on [a] or [u]. Angry
is least accurately decoded on [i] and vocalizations are least often
categorized as angry on [i]: this
perhaps lends support to the second hypothesis.
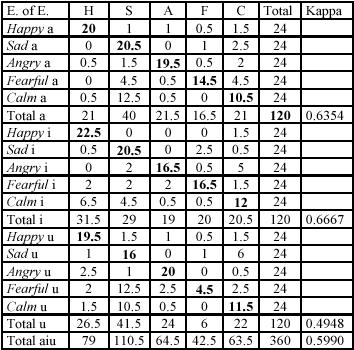
Figure 3‑2: English decoders’ discrimination of emotions
encoded by English speakers showing vowel quality, extracted from [Tik00]
From Figure 3‑3, English subjects also scored highest on decoding
Japanese vocalizations of emotions on [I], then [a], then [u], again supporting
Bezooijen’s suggestion. In addition, where subjects categorize a vocalization
as happy this is most likely to be on
[i]. They are more likely to decode an emotion as sad on [u] than on [i]. Happy
is most often confused with angry on
[a] and [i] but with calm on [u],
which may be relevant to the fifth hypothesis. However they were most likely to
decode vocalizations overall a
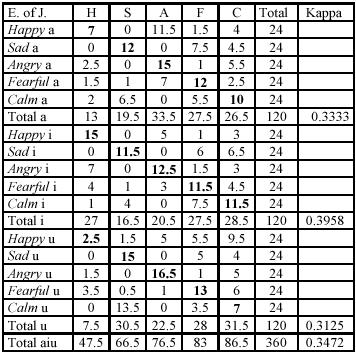
Figure 3‑3 English decoders’ discrimination of
emotions encoded by Japanese speakers showing vowel quality, extracted from [Tik00]
The conclusions,
which can be derived from this experiment and useful for the present thesis,
are as follows
·
All Emotions are generally, more accurately decoded on
[i] as compared to the other vowels [a] and [u].
·
The happy
emotion in particular is decoded most accurately on [i] and subjects are most
likely to categorize vocalizations overall as happy when they are encoded on
[i].
·
The angry emotion
is least likely to be decoded on [i] and vocalizations are least likely to be
categorized as angry on the [i]
region.
From the above
experiment, one can conclude that the vocal effects of possibly quasi-universal
psycho-biological response mechanisms may be signaling distinctions between the
emotions under consideration here which are enhanced in specific vocal regions
(from the conclusion of this experiment, in the [i] region). Also vocal effects
were speaker independent since there were 6 speakers in total from which the
data was derived. It could be possible that the acoustic properties of the
voice signal in this region [i] could be an instrumental aid in distinguishing
between emotions. This is the hypothesis we make from the conclusions of [Tik00] and the philosophy behind practical implementation of
extraction of the [a] and [i] regions from a voice signal. The next question
would be how could one distinguish a [a] or [i] region from the voice signal.
This is where the acoustic characteristics of vowels come into picture and for
a deeper understanding of formants as a function of the physical
characteristics of the voice production system, an extract from [Ven96] is explained below.
Vowels are characterized by the
presence of relatively intense and well-defined formants. First three formants
are adequate to perceptually discriminate between all English vowels. Source
spectrum for vowels is a complex periodic sound from the larynx. High vowels
have higher fundamental frequency or f0 than low vowels because of
the elevation of the larynx.
·
The
first formant or F1 is
primarily determined by the back cavity - the size of the cavity behind the
tongue hump. The back cavity is larger for the high vowels than for low vowels
because, for high vowels, the tongue is pulled forward and up. A larger cavity
results in a low F1 for high vowels.
·
The
second formant or F2 is
primarily determined by the front cavity - the cavity in front of the tongue
hump. Front vowels have small front cavity and, therefore, lower F2.
Lip rounding results in a larger front cavity and consequently a lower F2.
·
The
third formant or F3 is a
function of the entire vocal tract; the degree of coupling between the front
and back cavities primarily determines the value of F3. Low vowels
result in greater coupling between the two cavities and therefore, lower F3.
|
[i]
High, front
Low F1
High F2
High F3
|
[u]
High, back
Low F1
Low F2
High F3
|
|
Low, front
High F1
High F2
Low F3
[ae]
|
Low, back
High F1
Low F2
Low F3
[a]
|
Table 3‑1Vowels as a described by their formant characteristics, extracted from [Ven96]
Hence a difference in the position
of the first and second formant (F1
and F2), normalized by
the first formant position, is used as a value for detecting [a] and [I]
phonemes. Very generally, Phoneme [a] has the first and second formant very
close, and the first formant position very high, and phoneme [I] the exact
opposite i.e. The distance between first and second formant is larger than for
other vowels, and the first formant position is very low.
Assuming
a selected region from one utterance, the mean of the values (F2- F1)/ F1
is calculated for all the frames in the voiced region. For each utterance the
maximum and minimum of the values mean (F2- F1), max/min (mean (F2- F1)/ F1)
is computed and the corresponding voiced region is labeled as an [a] or [I]
respectively. The quality features will be calculated in either of the two,
following the previous criteria.
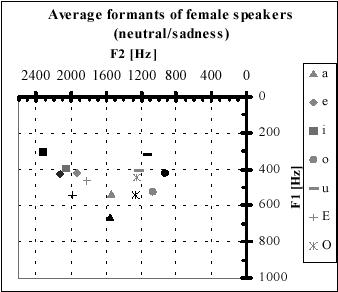
Figure 3‑4. Average
formant values for sadness (Grey symbols) compared with neutral (black symbols)
of female speakers as extracted from [kie00].
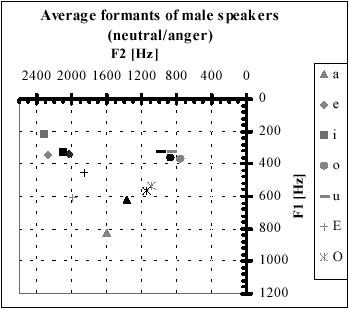
Figure 3‑5. Average formant values for anger
(Grey symbols) compared with neutral (black symbols) of male speakers as
extracted from [Kie00]
3.2.2.1
Emotions
as a function of vowels and formants
Another
paper by [Kie00] illustrates the relationship between emotions and formant
values (F1 F2) of each vowel. It was
observed from Figure 3‑4 and Figure
3‑5 that sentences expressing fear, sadness and boredom
are characterized by a formant shift towards a centralized position. It simply
means that in these emotions there is a minimal tendency towards articulating
each vowel. In contrast, the emotions angry and happy have the formant spectrum
distributed over a wide region. This indicates that speech is more pronounced
and accentuated in these emotions. From the above two papers, it can be
concluded that formant features can be used
·
To
distinguish between voiced regions containing [a] and [i] to extract the best
features from these regions for emotion classification. [Tik00]
·
As
input features for emotion classification. [Kie00]
The
speech signal shown below is the visual representation of an utterance
extracted from the Sony emotion database in the time and frequency domain. The
content of the utterance is the word “Hallo” spoken in German. The following
diagrams have been extracted from the PRAAT software.
Time ‘t’
Figure 3‑6: The command
“Hallo” emoted in angry tone
To
define the frequencies that are present at any given moment in the speech
signal, the Fourier Transformation is used. The result of Fourier analysis is
called spectrum. A spectrogram is created by displaying all of the spectra
together, envisions how the different frequencies change over time. Figure 3‑7 shows the spectrogram generated from the waveforms of
Figure 3.6. The x-axis of the spectrogram shows positive time toward the right,
as it did for the waveform, and the y-axis presents frequencies up to 5000
Hertz. The gray scales of the spectrogram represent the importance of the
acoustic peaks for a given time frame. The darkest horizontal bars give the
highest energy, usually belonging to vowels. These parts are called formants.

Figure 3‑7 Spectrogram of the above voice utterance “Hallo” indicating the formant
frequencies, fundamental frequency.
From Figure 3‑7and Figure
3‑8, the dashed boxes display the values of the formant
frequencies in the [a] region of “Hallo” and in the [i] region of “Ich”
respectively. The horizontal bands in Figure
3‑7 are much closer in this region with a high F1 and low F2 indicating a [a] region.
By contrast in Figure 3.8, the horizontal bands are much further apart with a
low F1 and high F2 indicating a [i] region.

Figure 3‑8 Spectrogram of the voice utterance “ich bin hier“
For every voiced region inside an utterance:
f1temp=Get first formant #first formant freq.
f2temp=Get second formant #second formant freq.
dif=f2temp-f1temp
coc_temp=dif/f1temp
·
First
formant frequency must not be higher than 1.2KHz
·
Second
formant frequency must not overpass 2KHz
·
10%
tolerance to admit candidates, whose first formant frequency is not maximal but
it is compensated by a closer position of the first two formants
if (f1temp>f1max) or
((f1temp/f1max>0.9) and (dif<dif_temp))
- The lowest formant ratio is
chosen with a 10% tolerance.
- To avoid confusion with /u/, candidates whose second formant
freq. is lower than 1000 are discarded
if(coc_temp/coc<1.1)or((coc/coc_temp>0.9)and(f2max<1000)){
coc=coc_temp
f1max=f1temp
f2max=f2temp
}
- If the region satisfies all the
requirements, following parameters are stored:
f1=f1temp # first formant freq.
f2=f2temp # second formant freq.
End for
This section gives a brief
description of the quality features, which have been calculated as per previous
research work. The quality features as explained in Section 2.1.2, are responsible for the evaluation/ pleasure
dimension of the emotion model in Figure
2‑1. The software used to compute quality features is
PRAAT, a freeware program developed by Dr. Paul Boersma and David Weenink,
Institute of Phonetic sciences at the University of Amsterdam. The software is
a research, publication, and productivity tool for phoneticians.
The quality features can be
categorized into the following sections:
1.
Harmonicity
based features
2.
Formant
frequency based features
3.
Energy
based features
4.
Spectral
tilt related features
Since the features listed below have
been results of past research conducted at MMI Lab, Sony International GmbH
only a brief explanation of the features is given below. For further extensive
reading please refer to [San02].
This section makes use of two
different methods for the calculation of the mean value of a given quality
feature within a voiced region:
Mean1: Arithmetic mean of the parameter
values over all the frames inside a voiced region.

Where
nframes = number of
frames inside a voiced region.
fi = feature value in the frame i.
Mean2: First, the Mean1 of the parameter
within a voiced region is computed. Then, single values of this parameter for
every frame are checked and the one, which is closest to the computed Mean1, is
considered as the mean (Mean2) of this region. This way, we assume that this
value comes from the most representative part inside the voiced region, since
the mean is influenced also by voiced region boundaries. It was experimentally
checked that the chosen frames normally matches the core of the vowel.

Where
nframes = number of frames inside a voiced region
n = index of the region
fi = feature value in the frame i
 = Mean1 of the feature in region n
= Mean1 of the feature in region n
From now, they are referred as Mean1 and Mean2 in the subsequent feature
calculation description.
Since harmonic to noise ratio is
clearly related to the voice quality, this voice quality attribute has been
said to provide valuable information about the speaker’s emotional state (s. [Error! Reference source not found., Alt00]).
Harmonic to noise ration estimation can be considered as an acoustic correlate for breathiness and
roughness, in agreement with [Alt00]. Therefore, voice quality cues, which help us to infer
assumptions about the speaker’s emotional state, can be extracted from this
attribute.
For each analysis window, Praat
applies a Gaussian-like window, and computes the LPC coefficients with the
algorithm by Burg. The Burg algorithm is a
recursive estimator for auto-regressive models, where each step is estimated
using the results from the previous step. The implementation of the Burg
algorithm is based on the routine memcof
and zroots in [Pre93]. This algorithm
can initially find formants at very low or high frequencies. From the values
obtained for every single frame, some features are computed, which will be used
as input for the emotional classification.
In total, 30 formant features have
been computed and these are:
1.
Formant
frequency minimum f2Mean – f1Mean for all the voiced
regions and means (2 features)
2.
Formant
frequencies for 3 formants subscripted by their means (6 features)
3.
Formant
ratios (4 features)
4.
Formant
bandwidths (9 features)
5.
Maximum
of a formant in a selected region (3 features)
6.
Range
of a formant in a selected region (3 features)
7.
Standard
deviation of a formant in a selected region (3 features)
The energy is calculated within four
different frequency bands in order to decide, whether the band contains mainly
harmonics of the fundamental frequency or turbulent noise. Frequency band
distribution is taken from a study [Kla97] focused on the perceptual importance
of several voice quality parameters. The four frequency bands proposed are:
1. From 0 Hz to F0 Hz (where F0 is the
fundamental frequency).
2. From 0 Hz to 1 kHz.
3. From
2.5 kHz to 3.5 kHz
4. From
4 kHz to 5 kHz.
There are in total, 10 energy based features.
There
are two classes of spectral based quality features:
1. Open quotient related features.
Open quotient is a spectral
measurement whose variations have been associated to changes in the glottal
source quality. Hence it would be a useful parameter in order to determine the
emotional state of the speaker.
2. Spectral Tilt related features.
From [San02],
Spectral Tilt has been also related to glottal source variations. It is one of
the major acoustic parameters that reliably differentiate phonation types in
many languages, and it can be understood as the degree to which intensity drops
off as frequency increases. Spectral tilt can be quantified when comparing the
amplitude of the fundamental to that of higher frequency harmonics, e.g. the
second harmonic, the harmonic closest to the first formant, or the harmonic
closest to the second formant. Spectral tilt is characteristically most steeply
positive for creaky vowels and most steeply negative for breathy vowels
Chapter
4
This chapter gives an explanation of
the experiments conducted till date. Prosodic features are employed to classify
the level of activation. The first series of experiments have been preliminary
and the motivation behind conducting these was to get a clearer understanding
of the present system, temporal research goals as well as the directions for
further research upon which I will be basing the work for this master thesis.
The sequence of steps involved whilst performing the experiment is as follows:
Input to the system consists of
voice samples from the Sony International GmbH database. These are stored in
NIST file format. The first program is used to cut the header of the NIST file. The ‘National Institute of Standards and Technology, USA’ defined the
NIST speech header format. Hence input to the data pre processing sub-system is
the emotional recording in NIST format and the output is the same file without
header and with the bytes of each sample swapped.
Compute_basismerkmale.c is the basic prosody module of the VERBMOBIL project. It extracts the
fundamental frequency contour, energy contour and voice/unvoiced decision of
each frame from an input speech file. These contours are used by another
program written by Rocio Santos for calculating prosodic features as well as
calculating voiced and unvoiced regions. PRAAT scripts for calculating voice
quality features will later on utilize these regions. The output of this sub
system is a feature file, which consists of a series of numbers representing
prosodic features where each line represents each utterance.
The feature files then serve as an
input to two program files, which are used to calculate statistics for each
feature like absolute maximum, mean. These are normalized between values of –1
to 1. After normalization, patterns files are created for training, evaluating
and testing the network. These files are passed through a Perl program, which
inserts SNNS pattern header for compatibility. These Perl programs have been
designed and programmed by Dr. Vicky Lam, scientist at the MMI lab, Sony
International GmbH.
The software utilized to train and
test the neural network classifiers is the Stuttgart
Neural Network Simulator (SNNS 4.2), developed at University of Stuttgart
and maintained at University of Tübingen.
SNNS offers a batchman program, which serves basically an additional
interface to the kernel that allows easy background execution. These batchman
scripts can be embedded in Perl programs, which in turn are executed for
training and testing different network topologies.

Figure 4‑1 Block Diagram
schema of the Emotion recognition system
In order to provide this document
with all the valuable information concerning the experiment conditions, the
same schema is used for the description of each one of the experiment series.
This schema contains the following aspects, further information about them can
be found in the pointed sections of this document.
·
Set of patterns: It specifies whether it is speaker
dependent or independent case and which and how many patterns are used for
training and/or testing.
·
Input features: Mention of the input features
utilized according to their description. When more than one set is tried, all
of them are here enumerated.
·
Output features: The intention of the experiment, which
emotions or groups of emotions are to be differentiated. When more than one NN
output configuration is tried, all of them are here enumerated.
·
Normalization:
Normalization is made to give the neural network similar range values in
all the input nodes, regardless their magnitude. Here, it is specified which
divisor vector has been used in this task.
·
Neural network (NN) configuration: Information about the neural
networks tried; number of layers and hidden nodes, activation function and learning
algorithm employed. All the configurations tried are here mentioned, despite
only the most significant results are commented. For a clearer understanding of
the topologies used in the thesis please refer to Section 2.2.
·
Analysis function: Once we get the neural network
outcomes, we need a decision rule to determine the emotion of the input
sentence.
·
Confusion
matrix, considerations and conclusions are presented. Despite an experiment can
try many different configurations, only the optimal case is usually analyzed
and presented here.
A couple of experiments were
performed to illustrate the difference between cross-validation and the
70-15-15 test. These are two different neural network training and testing
procedures and the result of both the procedures is an indication of which of
these two procedures is suitable for the present database.
a) The 70-15-15 procedure involves
around seventy percent of the patterns for training and the remaining for
evaluating and testing of the NN. This method has inherent drawbacks in the
present system, since for the results of this method to be statistically
correct; the number of patterns must be large in number.
b) The cross-validation procedure
involves the following steps. A single pattern is extracted from the pattern
set and the neural network is trained with the remaining patterns. Finally the
network is tested with this extracted pattern. This process is repeated
iteratively till the NN is tested for each and every pattern in the system. It
should be noted that the NN is initialized for each iteration. The results of
this method are an average of the results for each iteration. From a
statistical standpoint, this is more accurate than the 70-15-15 case, if the
amount of data is not sufficient which is true in the present case since the
emotion database does not contain a large data set.
c) Testing with a noisy microphone:
The following experiment has been used to test the system with data extracted
from a standard m3 SONY microphone. Prior to this, all experiments were
conducted using a high quality C38B condenser microphone. This experiment was
performed keeping in mind, the possibility of demonstrations for future AIBO
prototypes conducted with a standard microphone and the testing of the
robustness of the Neural Network with data mixed with noise.
Ø
Objective
·
Set Of Patterns
Speaker dependent case, Raquel Tato
consisting of 814 patterns. Neutrals are always duplicated, since on the
activation level we are classifying 5 emotions into 3 categories of high (angry
and happy), low (sad and bored) and base (neutral). The network must be trained
with equal number of patterns from all three levels, as a result of which the
neutrals are duplicated.
·
Input features:
P1.0-P1.36
36 prosodic features consisting of energy and fundamental frequency,
fundamental frequency derivative contour.
·
Output features
Happy and Angry (1 0 0), Neutral (0
1 0), Sad and Bored (0 0 1)
Ø
Conditions
·
Normalization
Normalized by maximum of all the
patterns in the training set
·
Neural network (NN) configuration
No hidden layer; logistic activation
function; Standard Backpropagation and Backpropagation with Chunkwise update
learning algorithms with multiple step training.
Ø Results and conclusions
The
resulting tables indicate the confusion matrix format of the network results.
Confusion among emotions could yield valuable information regarding insight
into new relational hypothesis between the emotions. In confusion tables, rows
represent the emotions expressed by the speaker and columns are the neural
network decision and the values represent the guess percentages. Hence the left
diagonal of the matrix must contain elements with values 100 for a perfect
classifier.
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
95.65
|
4.35
|
0.00
|
|
Neutral
|
16.67
|
35.00
|
48.33
|
|
Bored/sad
|
2.17
|
10.87
|
86.96
|
Table 4‑1 Confusion matrix of 4.3.1 a (70-15-15) for the Chunk learning algorithm
Average = 69.07
Chart 4‑1 Graphical
representation of Table 4-1
Comparing tables Table 4‑1 (70-15-15) and Table
4‑2 (cross-validation), it can be inferred that the range
of values along the diagonal in the latter case is less extreme. The average
balance of emotions is significantly higher showing a six percent improvement.
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
85.76
|
13.65
|
0.59
|
|
Neutral
|
9.76
|
76.83
|
13.41
|
|
Bored/sad
|
1.92
|
38.66
|
59.42
|
Table 4‑2 Confusion matrix of 4.3.1 b (cross-validation) for the Stdbp learning
algorithm
Average
= 74.33
Chart 4‑2 Graphical
representation of Table 4-2
Comparing Table 4‑2 and Table 4‑3, the conditions for testing the NNs were identical
with the sole exception of the microphones used during the emotion recordings.
C38 condenser microphone for Table 4‑2 and M3 standard Sony microphone for Table 4‑3. Hence it can be inferred that the NN is robust when
data from a low quality microphone (in the case of the M3 standard microphone)
is introduced into the network
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
90.50
|
9.50
|
0.00
|
|
Neutral
|
11.59
|
73.17
|
15.24
|
|
Bored/sad
|
4.15
|
37.70
|
58.15
|
Table 4‑3 Confusion Matrix of 4.3.1c (Low quality Microphone)
Average = 74.33
Chart 4‑3 Graphical representation of Table 4-3
A
background history of the emotions database must be explained for the basis
behind the following two experiments. It was concluded from previous research
that during the emotion recording was not accurate since the neutrals contained
emotional content. This was because of the recording mechanism wherein neutrals
would have been recorded between extreme emotions. From the speaker’s
perspective, a neutral emotion would be difficult to elicit in such a
situation. These sets of recordings were called stories. It was then decided to record the neutrals separately as
read text. These set of recordings are called commands.
Ø
Objective
CASE A Speaker dependent case, Raquel Tato
stories and commands consisting of 814 patterns.
CASE B Raquel Tato commands
·
Input features:
P1.0-P1.37
37 prosodic features consisting of energy and fundamental frequency,
fundamental frequency derivative contour and jitter.
·
Output features
Happy and Angry (1 0 0), Neutral (0
1 0), Sad and Bored (0 0 1)
Ø
Conditions
·
Normalized
by maximum of all the patterns in the training set
·
Hidden
layers HD1=10 HD2=5; logistic activation function; Standard Backpropagation and
Backpropagation with Chunkwise update learning algorithms with multiple step
training.
·
WTA
(Winner Takes All) Analysis function.
Ø
Results and conclusions
Neutrals seem
to be more corrupted or confused since the test uses the combination of
commands and stories. Bored/sad
and neutral are confused more often than angry, which might indicate that bored
sad and neutral might lie closer to each other on the activation plane as
compared to angry and neutral. This is my hypothesis for the moment from this
experiment.
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
92.28
|
6.23
|
1.48
|
|
Neutral
|
17.86
|
43.45
|
38.69
|
|
Bored/sad
|
2.24
|
13.42
|
84.35
|
Table 4‑4 Confusion matrix of 4.3.2a (stories and commands) for the Chunk learning algorithm
Average = 73.123734
Chart 4‑4 Graphical
representation of Table 4-4
While
comparing Table 4‑4 and Table 4‑5, it can be inferred that the hypothesis suggesting
that emotional content was present in Stories recordings is true since the
confusion on the Neutral row is much higher in Table 4‑4.
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
85.20
|
14.80
|
0.00
|
|
Neutral
|
8.16
|
75.51
|
16.33
|
|
Bored/sad
|
1.53
|
21.43
|
77.04
|
Table 4‑5 Confusion matrix of 4.3.2b (Commands) for the Stdbp learning algorithm
Average = 79.251701
Chart 4‑5 Graphical representation of Table
4-5
The following experiments are derivatives from
the experiment of page 207 in Rocio’s thesis. The objectives of these
experiments is to first train and test the neural network with the raw data
(.NIST files) and later on make comparative results with data mixed with noise
(.e000.m3.NIST). The organization of the experiments is based on the number of
patterns introduced to the NN. In other words, I have divided this section into
3 parts.
·
The first case is
making use of all the data from Thomas, including stories and commands. (.NIST
files)
·
The second case
is making use of all data from stories and only neutral emotions from commands.
(.NIST files)
·
The third case is
making use of all data from Thomas stories and only neutral emotions from
commands mixed with noise. (.e000.m3.NIST)
I
have abbreviated the conventional way of dividing the pattern files into
seventy percent, fifteen percent and fifteen percent for training, evaluation
and testing as the 70-15-15 method.
4.4.1 Case 1 Thomas stories and commands
Ø
Objective
·
Speaker dependent
case, Thomas.
·
All patterns from
Thomas stories and commands
·
Input features
10
Prosodic Features
·
Output features
Happy
and Angry (1 0 0), Neutral (0 1 0), Sad and Bored (0 0 1)
Ø
Conditions
·
Normalized by maximum of all the
patterns in the training set
·
2 hidden layers
HD1=10 HD2=5; logistic activation function;
Ø
Results and Conclusions
The experiment conducted did not
yield good results. The best one is shown in the Table 4‑6 below:
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
70.13
|
22.35
|
7.52
|
|
Neutral
|
12.22
|
66.06
|
21.72
|
|
Bored/sad
|
0.94
|
19.29
|
79.76
|
Table 4‑6
Confusion matrix for Rprop 0.2 50 4
learning algorithm using cross validation algorithm
TOTAL: 71.872
Chart 4‑6 Graphical
representation of Table 4-6
Again using 70-15-15 method yielded erroneous results due to lack of
sufficient amount of patterns, hence statistics depending on chance of the
distribution of the patterns over training evaluating and testing.
The results are shown
below:
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
58.21
|
31.34
|
10.45
|
|
Neutral
|
21.13
|
64
|
14
|
|
Bored/sad
|
0
|
32.86
|
67.14
|
Table 4‑7 Confusion matrix for Stdbp learning algorithm
Average = 63.46
Chart
4‑7 Graphical representation of Table 4-7
In general, when the whole pattern set consisting of Thomas stories and
commands are used, the results are the worst among all three cases. Also Rprop
algorithm gave the best results for all the cases.
4.4.2 Case 2 Thomas Stories and only neutral commands
Ø
Objective
·
Speaker dependent
case, Thomas.
·
All patterns from
Thomas stories and only neutrals from commands
·
Input features:
10
Prosodic Features
·
Output features
Happy and Angry (1 0 0), Neutral (0 1 0), Sad and Bored (0 0 1)
Ø
Conditions
·
Normalized by
maximum of all the patterns in the training set
·
2 hidden layers
HD1=10 HD2=5; logistic activation function;
Ø
Results and Conclusions:
a. Cross-Validation Test:
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
75.86
|
20.69
|
3.45
|
|
Neutral
|
13.89
|
70.14
|
15.97
|
|
Bored/sad
|
1.65
|
17.36
|
80.99
|
Table 4‑8 Confusion matrix for Rprop 0.5 50 4 learning algorithm
Average = 75.36

Chart 4‑8 Graphical representation of Table 4-8
NN training was performed
using Rprop algorithm in the single step mode. The cross-validation test was
performed only for Rprop 0.5 50 4, since this was yielding the best results and
due to length of computation time for the following experiments, I have made
the general assumption that the other networks would not perform much better
than this one or average close to this one.
b. 70-15-15 Test
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
58.21
|
31.34
|
10.45
|
|
Neutral
|
21.13
|
64
|
14
|
|
Bored/sad
|
0
|
32.86
|
67.14
|
Table 4‑9 Confusion matrix for Rprop 0.3 50 4 learning algorithm
Average = 65.625
Chart 4‑9 Graphical representation of Table 4-9
It will be seen from case 3, that the system
when mixed with noise performs better than the system without noise. Please
refer to Section 6 Conclusions for an explanation of this phenomenon.
Ø
Objective
·
Speaker dependent
case, Thomas.
·
All patterns from
Thomas stories and neutrals from commands with noise
·
Input features:
10 Prosodic Features
·
Output features
Happy and Angry (1 0
0), Neutral (0 1 0), Sad and Bored (0 0 1)
Ø
Conditions
·
Normalized by
maximum of all the patterns in the training set
·
2 Hidden layers
HD1=10 HD2=5; logistic activation function;
Stdbp
and Chunk update single step
Rprop single step
Rprop single step with pruning
Ø
Conclusions and Results
a. Stdbp and Chunk
The first experiment
tried was with Stdbp and Chunk. The results were averaging at around 65%.
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
53.33
|
46.67
|
0.00
|
|
Neutral
|
0.00
|
100.00
|
0.00
|
|
Bored/sad
|
10.00
|
50.00
|
40.00
|
Table 4‑10 Confusion matrix for Stdbp learning algorithm
Average = 67.500000
Chart 4‑10 Graphical representation of Table 4-10
b. Rprop using 70-15-15
Then
Rprop-learning algorithm was used. The results were a bit extreme indicating a
possibility of erroneous statistics. I took a look at the result files and
found that an error in the classification of a pattern resulted in a steep 6-7%
increase/decrease in the confusion matrix statistics. 2 results are shown below
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
100.00
|
0.00
|
0.00
|
|
Neutral
|
6.67
|
93.33
|
0.00
|
|
Bored/sad
|
10.00
|
30.00
|
60.00
|
Table 4‑11 Confusion matrix for Rprop 0.5 50 4 learning algorithm using 70 – 15 – 15
Average = 87.500000
Chart 4‑11 Graphical representation of Table 4-11
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
93.33
|
6.67
|
0.00
|
|
Neutral
|
6.67
|
86.33
|
6.67
|
|
Bored/sad
|
10.00
|
20.00
|
70.00
|
Table 4‑12 Confusion matrix for Rprop 0.6 50 4 learning algorithm
using 70-15-15
Average = 85.5
Chart 4‑12 Graphical representation of Table 4-12
This
indicates that by chance probability a “good” set of patterns was taken for
testing, which resulted in these figures.
c. Rprop Using
Cross validation
The next step would be to run a cross-validation
test to test the authenticity of Table 4‑11. The results of this are shown in the next table and
the figures show that although it isn’t too far from Table 4‑11, the results are still good. The best 2 results are
as follows
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
84.52
|
12.26
|
3.23
|
|
Neutral
|
12.50
|
72.92
|
14.58
|
|
Bored/sad
|
1.65
|
12.40
|
85.95
|
Table 4‑13 Confusion matrix for Rprop 0.5 50 4 learning algorithm with cross validation test
Average = 80.95
Chart 4‑13 Graphical representation of Table 4-13
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
80.00
|
16.7
|
3.3
|
|
Neutral
|
15.28
|
70.14
|
14.58
|
|
Bored/sad
|
2.48
|
9.09
|
88.43
|
Table 4‑14
Confusion matrix for Rprop 0.6 50
4 learning algorithm with cross
validation test
Average = 79.04
Chart 4‑14 Graphical
representation of Table 4-14
d. Pruning (Stdbp 0.1
0.2 ) + Rprop training using 70-15-15
Finally
the results for network pruning(Stdbp 0.1 0.2) + Rprop were not too different
from the ones presented in Rprop
using 70-15-15. The results are as
indicated below:
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
86
|
13
|
0
|
|
Neutral
|
6
|
93
|
0
|
|
Bored/sad
|
20
|
20
|
60
|
Table 4‑15 Confusion matrix for pruning(Stdbp 0.1 0.2 ) and
Rprop 0.6 50 4 learning algorithm with cross validation test
Average = 82.5
Chart 4‑15 Graphical representation of Table
4-15
|
|
CASE 1
All
patterns with no noise
|
CASE 2
Stories
and neutral commands with no noise
|
CASE 3
Stories
and neutral commands with noise
|
|
Cross
validation using Rprop
|
71.87
|
75.36
|
80.95
|
|
70-15-15 Stdbp andchunk
|
NA
|
NA
|
67.500000
|
|
70-15-15
Rprop
|
63.46
|
65.625
|
87.5
|
|
70-15-15
Rprop + pruning
|
NA
|
NA
|
82.5
|
Figure 4‑2 Summary of the prosodic experiments
conducted on the speaker Thomas
Please note regarding the value 65.625 in the table
corresponding to “70-15-15 Rprop” and “stories and neutral commands with no
noise”. This value should have been at least close to the results of previous
research work conducted at Sony but this was not so. Hence I performed another
test, and this time I did not use the randomizing function which is normally
used to divide the patterns into train-evaluation-test, but I gave a new format
to the entire pattern set in the way the patterns are ordered while training.
The original goal of the randomizing function was its application on data
consisting of thousands of patterns. Unfortunately when the number of patterns
are a few hundred in number the randomizing function fails to give a good mix
in the three classes of training testing and evaluating.
The new format
is the entire pattern file consists of sequential blocks of angry, happy,
neutral, sad, bored. This way the network is more evenly trained and not biased
towards a certain emotion, because of a block of patterns containing the same
emotion during training. The results were as predicted much better than 62.5
above as can be seen from Table 4‑15, which has an average of 81.48.
Result of a good pattern mix
|
|
Happy/Angry
|
Neutral
|
Bored/Sad
|
|
Happy/Angry
|
77.78
|
16.67
|
5.56
|
|
Neutral
|
16.67
|
83.33
|
0.00
|
|
Bored/sad
|
0.00
|
16.67
|
83.33
|
Table
4‑16 Confusion matrix Rprop 0.3 50 4
training algorithm
Average = 81.48
Chart 4‑16 Graphical
representation of Table 4-16
This section gives a general summary
on the list of experiments performed in chapter 4. The targeted dimension of
emotion is the activation level or the prosodical dimension. Hence the outputs
are always high, medium and low as per the activation level.
Section 4.3 describes the first series of experiments
performed under the heading of preliminary experiments.
·
In
section 4.3.1, the concepts of cross-validation and the
70-15-15 method have been explained. Briefly it can be concluded that
cross-validation is a useful procedure when the target database to be trained
by the neural network is small.
·
In
section 4.3.1, analysis was performed using a noisy microphone
from data extracted by the speaker Raquel.
The resulting tests show that the
NN system performs robustly with data extracted from the noisy microphone.
·
In
section 4.3.2, addressed the philosophical issue of what can
be defined as “real“ neutral emotions.
This was followed by an in-depth
analysis using different NN on different combinations of data extracted from
the speaker Thomas.
·
The
most important conclusion from these series of experiments, which can be seen
from section 4.4.3 is that when data is mixed with no hall noise,
the system performs better than data extracted from the studio microphone.
Research is currently undergoing into the reason for this phenomenon.
Chapter
5
The classification of emotions using
voice quality features is a brand new field of investigation, which is being
used and referred in many lately studies concerned to emotion recognition [Alt00].
Experiments have been conducted with
the basis of testing the hypothesis that emotions can be discernible more
easily from regions containing the [a] and [i] vowels. The initial idea was to
extract the regions containing the [a] and [i] based on the formant
characteristics of the vowels. The resulting problem as found out by manually
comparing the resulting regions computed by the program which distinguishes [a]
and [i] vowels and listening to the utterances was the inclusion of voiced
consonants as computed by the voiced region program compute basismerkmale.
The following table describes the
discrepancies produced by the program compute_basismerkmale from the VERBMOBIL
project. This is a result of manually listening to the utterances and checking
the corresponding voiced regions computed by compute_basismerkmale and the
voiced regions, which can be perceived.
|
Filename
|
Number of voiced
regions computed by the program
|
Actual number of
voiced regions
|
AIBO command utterance “letters in bold are voiced regions”
|
|
Id0002/a001a
|
1
AIBO
is assumed to be completely a voiced region
|
2
|
AIBO
|
|
Id002/a002a
|
2
Ich
is not recognized as a voiced region
|
3
|
Ich
bin da
|
|
Id002/a003a
|
3
“Gu”
– 1st region
“tenmorg” – 2nd
region
“gen” - 3rd region
|
4
|
Guten Morgen
|
|
Id002/a005a
|
1
“Stehauf” – 1 voiced
region
|
2
|
Steh Auf
|
|
Id002/a006a
|
1
“Hallo”
– 1 voiced region
|
2
|
Hallo
|
|
Id002/a010a
|
2
“kommwir”
– 1st voiced region
“tanzen” – 2nd voiced region
|
4
|
Komm wir spielen
|
|
Id002/a011a
|
3
“Kommwir”
– 1st voiced region
“tan”
– 2nd voiced region
“zen”- 3rd voiced region
|
4
|
Komm wir tanzen
|
|
Id002/a012a
|
3
“woist”
– 1st voiced region
“der”
– 2nd voiced region
“ball”-
3rd voiced region
|
4
|
Wo ist der ball
|
|
Id002/a017a
|
2
“lauf”
– 1st region
“nachlinks” – 2nd
region
|
3
|
Lauf nach links
|
|
Id002/a019a
|
1
“Vorwarts”
– 1 voiced region
|
2
|
Vorwarts
|
Table 5-1Examples of erroneously declared
voiced regions by the program compute_basismerkmale
Also
from forced listening to the emotions expressed by the 14 speakers it cannot be
accurately inferred by listeners what kind of emotions is being portrayed.
Hence the next step was to test the hypothesis on one reliable speaker, namely
Thomas.
Hence the next step was to test the
hypothesis by using a forced alignment of the phoneme recognizer and extracting
the features from the [a] and [i] regions as indicated by the recognizer. A
program in Perl was written to extract the [a] and [i] regions from the phoneme
file.
|
#
1.720000 121 _p:_
1.820000 121 I
1.870000 121 C
1.940000 121 b
2.020000 121 I
2.100000 121 n
2.140000 121 d
2.490000 121 a:
3.100000 121 _p:_
|
Table 5-2 Phoneme file format as outputted
from the phoneme recognizer for utterance “ich bin da“
Where,
_p:_ indicates silence
from time 0.0s to 1.72s
I indicate utterance of the
phoneme [i] from 1.72s to 1.82s and so forth.
The new
regions as computed by the recognizer resulted in errors in feature computation
by the Praat program. After again conducting listening tests on the data, it
was found that the recognizer erroneously detects regions of a voice filled
with silence as a voice signal. The resulting files, which were subject to
these errors, were filtered out and the resulting pattern set is around 80-90%
the size of the original pattern set.
Figure 5‑1 Forced
alignment phoneme experiment vs. formant algorithm experiment
A comparative study is performed
with networks using different topologies and only the best results are as
indicated below. The data used in this experiment is Thomas stories and
commands. The following experiments are organized depending on the pattern set
used.
I have extracted two different pattern sets
·
(20 input features). Which is
normally used for the speaker independent case.
·
(16 input features). Which is normally used
for the speaker dependent case.
There exists in total
four different pattern sets.
- 20
input nodes pattern set extracted from Thomas stories and commands using
- The
algorithm based on the formant characteristics (f2-f1)/f1
- Forced
alignment of the phoneme recognizer
- 16
input nodes pattern set extracted from Thomas stories and commands using
- The
algorithm based on the formant characteristics (f2-f1)/f1
- Forced
alignment of the phoneme recognizer
All of the following experiments
have been conducted using the Rprop algorithm since it clearly performs much
better than the standard Backpropagation and the Chunkwise update. Also all the
experiments have been conduced using only the 70-15-15 method, hence these can
be regarded as only initial tests. Further more affirmative conclusions can be
deduced after performing cross validation tests.
These
are the 20 input nodes corresponding to those normally extracted in the speaker
independent case. It would be useful to find out how the network performs for
both the algorithms.
ü Algorithm A Based on the formant
characteristics (f2-f1)/f1
ü Algorithm B Forced alignment of the
phoneme recognizer
Ø
Objective
·
Speaker dependent case, Thomas.
All patterns from Thomas stories and
neutrals from commands
·
Input
features:
20 Quality
Features
·
Output
features
Happy and
Angry (1 0 and 0 1)
Ø
Conditions
·
Normalized
by maximum of all the patterns in the training set
·
Different
network topologies implemented; logistic activation function;
·
Rprop
single step
Ø
Conclusions and Results
a. Data extracted via
Algorithm A based on formant characteristics (f2-f1)/f1
Rprop training using 2 hidden layers
hid1=10 hid2=5 was used using single step shown in Table 5‑3. The best results were found for Rprop 0.2 50 4.
|
|
Angry
|
Happy
|
|
Angry
|
71.11
|
28.89
|
|
Happy
|
44.44
|
55.56
|
Table 5‑3 Confusion matrix Rprop 0.2 50 4
training algorithm
Average = 65.28
Chart 5‑1 Graphical
representation of Table 5-1
b. Data extracted
via Algorithm B Forced alignment of the phoneme recognizer
a) Rprop training using 2 hidden layers hid1=10
hid2=5 was used using single step shown in Table
5‑4. The best results were found for Rprop 0.6 50 4. The
results look promising
|
|
Angry
|
Happy
|
|
Angry
|
71.43
|
28.57
|
|
Happy
|
17.86
|
82.14
|
Table 5‑4 Confusion matrix Rprop 0.6 50 4
training algorithm
Average
= 76.79
Chart 5‑2 Graphical
representation of Table 5-2
On comparing the results with the
previous experiment of Table 5‑3
under similar test conditions, there is a high increase in the recognition rate
from 65% to 76%. This indicates a slight possibility that the hypothesis that
emotions can be more easily recognized in the [a] and [i] vowels. It will be
seen later that Algorithm B does not perform well as shown in Table 5‑4 when trained with speaker dependent features (Case
B). The possible reasoning could be that since emotions recognized from [a] and
[i] are speaker independent as deduced from Alison Tickle’s experiment, speaker
independent features have a much greater improvement when extracted from these
regions.
These are the 16 input nodes corresponding to
those normally extracted in the speaker dependent case. It would be useful to
find out how the network performs for both the algorithms.
ü Algorithm A based on the formant
characteristics (f2-f1)/f1
ü Algorithm B forced alignment of the
phoneme recognizer
Ø
Objective
·
Speaker dependent case, Thomas.
·
All
patterns from Thomas stories and neutrals from commands
·
Input
features:
20 Quality
Features
-Output features
Happy and
Angry (1 0 and 0 1)
Ø
Conditions
·
Normalized
by maximum of all the patterns in the training set
·
Different
network topologies implemented; logistic activation function;
·
Rprop
single step
Ø
Conclusions and Results
a. Data extracted via Algorithm A
based on formant characteristics (f2-f1)/f1
Rprop training using 2
hidden layers hid1=10 hid2=5 was used using single step shown in Table 5-5. The best results were found for Rprop 1 50 4.
|
|
Angry
|
Happy
|
|
Angry
|
75.00
|
25.00
|
|
Happy
|
41.67
|
58.33
|
Table 5-5 Confusion matrix
Rprop 1 50 4 training algorithm
Average
= 69.44
Chart 5‑3 Graphical
representation of Table 5-3
Rprop
using single hidden layer hid1=5 was used using single step learning parameter
shown in Table 5-6. The results for Rprop 0.9 50 4 are indicated below.
|
|
Angry
|
Happy
|
|
Angry
|
68.75
|
31.25
|
|
Happy
|
25.00
|
75.00
|
Table 5-6 Confusion matrix Rprop 0.9 50 4
training algorithm
Average
= 70.83
Chart 5‑4 Graphical representation of Table 5-4
b. Data extracted
via Algorithm B Forced alignment of the phoneme recognizer
a) Rprop training using a single hidden layer
hid1=5 was used using single step shown in Table
5-7. The other topologies (no layer and two hidden
layers) did not perform well for the
|
|
Angry
|
Happy
|
|
Angry
|
67.62
|
34.48
|
|
Happy
|
29.17
|
70.83
|
Table 5-7 Confusion matrix Rprop 0.6 50 4
training algorithm
Average
= 67.85
Chart 5‑5 Graphical
representation of Table 5-5
Henceforth,
please note that since the statistics from the 70-15-15 method are taken from a
very small number of patterns the confusion results are more “whole numbered”
in nature as compared to the cross-validation results which are statistics
based on a much larger number of patterns.
This section gives a general summary
of the experiments performed in chapter 5. The targeted dimension of emotion is
the evaluation level or the quality features dimension. The general motive has
been to effectively discriminate between the emotions angry and happy. To this
end, it was hypothesized that emotions can be observed better in the [a] and
[i] regions and consequently features extracted from these regions would be
successful in discriminating between emotions. Whilst performing experiments
using formant characteristics, it was found that the program
compute_basismerkmale erroneously identifies unvoiced regions as well as voiced
consonants. The next step was to perform a forced alignment with the phoneme
recognizer and test if the above-mentioned hypothesis is true. The initial
results seem to be encouraging and point towards a possible increase in emotion
identification.
|
|
16
Input Nodes
|
20
Input Nodes
|
|
Algorithm
A
Formant
characteristics
|
70.83
|
65.28
|
|
Algorithm
B
Phoneme
Recognizer
|
67.85
|
76.79
|
Table 5‑8 Summary of the quality experiments
performed on the speaker data Thomas
Chapter
6
The
area of emotion recognition has become an area of increasing interest in the
Artificial Intelligence world. The target scenario in this thesis is the
development of AIBO, the Sony entertainment robot. This thesis makes use of
cutting-edge- technology in the field of emotion recognition at the man-machine
interface lab at Sony International GmbH.
To get
a deeper understanding of the complexity of the system as well as to validate
the results from past research work, a series of preliminary tests were
performed. The goals of the preliminary tests addressed the issue of the
cross-validation procedure vs. the 70-15-15 procedures. In applications where
the amount of data is very small and not statistically significant towards
making concrete conclusions, the cross-validation procedure is the best
approach. Next, we approach the philosophical question of what exactly a
neutral emotion should be? In my opinion, a perfect neutral emotion could be
defined as one carrying on a constant pitch, energy and the other features
throughout an utterance. Of course such a neutral can never exist except
probably in synthesized voiced used in robots. In reality neutral emotions are
always colored with different degrees of other emotions.
The main
objective of this thesis has been research into the pleasure dimension (or
quality features) of the Activation – Evaluation plane of emotions. From
literature derived from psychological experiments it has been found that
emotions are recognized well in certain phonetic regions of the phonetic
spectrum, namely [a] and [i]. We have hypothesized that the acoustic
characteristics of these regions are more conducive to emotion recognition as
compared to the other regions. Due to the characteristic features of formants,
it was possible to uniquely identify these [a] and [i] regions. Unfortunately
for the present system, a problem lies with a predecessor program, which
wrongly computes voiced regions by including voice consonants. Hence the result
of the formant algorithm was to include the voiced consonants as regions for
feature extraction. The next step was to test the hypothesis by performing a
forced phoneme alignment test by running a phoneme recognizer though the sound
files of the database. The phone files produced as output indicate the regions
of every phoneme of the utterance. An acoustic analysis of the features
extracted from [a] and [i] phoneme regions were conducted by feeding the
resulting voice quality features extracted from these regions into an
artificial NN. Initial results from this experiment have shown a sharp increase
in emotion discrimination indicating the possibility of some truth in the above
hypothesis.
The
secondary goal of the thesis has been to train different configurations of NN with
different variations of data like noisy data as well as data extracted from a
low quality microphone and test if the resulting networks give results, which
are at par with results of testing data extracted in a studio environment.
Surprisingly, the results are better in the case of data mixed with a little
noise as compared to data from the studio environment. To back the feasibility
of such results, consider the probability distribution of a feature
successfully being identified in its feature space. The distribution would be
much wider in nature when a little noise is mixed into the system as compared
to the sharp boundaries in a probabilistic distribution for pure data. Assuming
the classes of angry and happy are wide apart in the feature space, the range
of values the feature must possess to be successfully included into a class of
emotions is hence much larger when mixed with noise resulting in an improvement
in emotion discrimination.
The
motivation behind conducting the above mentioned experiments is to obtain a
speaker independent robust emotion recognition system for future demonstration
and possibly including it into next generation prototypes of the Sony
entertainment robot AIBO.
NN Neural
Network
LPC Linear
Prediction Coefficient
HNR Harmonics
to Noise Ratio
Stdbp Standard
Backpropagation learning algorithm
Chunk Chunkwise
update learning algorithm
Rprop Resilient
Backpropagation
70-15-15 NN test of dividing patterns into 70% for
training, 15% for evaluation and 15% for training
AIBO Artificial
Intelligence Ro(bot) or in Japanese “companion“
REM Rapid Eye Movement
A
problem faced in the research of emotions contained in speech data is the fact
that the database, which is the basis of subsequent research work, is very
small. To this end, an emotional database has been recorded, simulating
different possible situations comprising of a spectrum of desired emotions.
From the application point of view it has been decided to introduce five
emotions namely, angry, happy, bored, sad and neutral. The following example scenario has been
implemented at the Sony recording studio. The subject is required to emote the
text in black with the help of graphical cues.
7.30 am. The alarm clock rings. You wake up in
a good mood and you want to take a shower. AIBO is waiting in front of your
bed, wagging its tail. Pleased to see him you shout:
AIBO!
Hello!
Good Morning.
Should we do something
together?
Let’s play!
AIBO shakes his head and takes a step towards
you. You think you know what he wants. So you ask again:
Walk around!
AIBO is wagging its tail. This is his way to
show that he wants to go outside. You also want to exercise before you will
take a shower.
Let’s go.
You walk to the door, but AIBO does not follow
you. So you try to motivate him.
AIBO!
Go forward!
Let’s go
And here he comes barking loudly with joy. As
the neighbors does not like that noise you try to stop him lovingly.
Be quiet!
AIBO starts barking again. You look him deep in
the eyes and talk explicitely, but still in a calm mood:
AIBO!
Be quiet!
AIBO runs to the elevator and barks again.
You start getting angry:
AIBO!
Once more!
Be quiet!
Come on!
Walk around!
Now he notices that there is something amiss.
He gets quiet and goes into the elevator. You say:
Sit down.
And he sits down immediately. Now then – you do
not have to get always angry. You pet and praise him.
Good boy!
Arriving at the ground floor, you see some
people waiting for the elevator. You want to show what a good dog AIBO is, so
you say politely, but firm:
Stand up.
Go forward.
Out on the street, AIBO runs off immediately.
But you still want to go to the bakery, so you have to advice him.
Go left.
Arriving at the next corner you say:
Go right.
AIBO runs past the bakery. You laugh about his
lack of orientation, and you say:
Go back!
You met in front of the bakery. You go into the
shop but of course AIBO has to wait outside. Anticipating the delicious
croissants, you ask AIBO:
Sit down!
You look at him seriously, then you turn around
and step in. You look back quickly to insure yourself that AIBO is sitting.
Unfortunately you have to see that he stands up and sniffs at people walking
by. Now you really get angry, because you have trained this very situation so
often. So you go outside again and talk to AIBO angrily:
AIBO!
Sit down!
What is the problem with that dog today? You
have to repeat every order! Your good mood has gone. On your way home you are
just angry, bossing AIBO irritated:
Go forward!
Are you deaf?
Go forward!
Walk around!
Turn left!
Stop, now…
Turn right!
No!
Go back!
You have to continue in this style the whole
long way back. That gets really on your nerves. Arriving at home, you explain
this to AIBO.
I don’t want to walk around
with you any longer!
And now:
Let’s go!
After having your shower and a relaxed
breakfast, there is little time left before you have to go to work. You think
about if it would not be better to bother more with the dog, so that he obeys
you more often. Therefore, you play ball games with him. You show the ball to
AIBO, then you put it slowly away. You speak calmly:
Where is the ball?
Find the ball.
AIBO hesitates. You repeat your orders with a
joyful voice:
Where is the ball?
Find the ball!
AIBO runs to the ball. To summon the dog you
say:
Kick the ball!
AIBO obviously does not know what to do. You
jog the ball with one hand, calmly explaining:
Kick the ball.
[Alb 02] Albert Mehrabian, Incorporating Emotions and
Personality in Artificial Intelligence Software, 2002
[Alb74] Mehrabian, A.; Russel, J.: An approach to environmental psychology. Cambridge:
MIT Press. 1974.
Alt00] Alter, K.; Rank, E.; Kotz, S.A.; Toepel, U.;
Besson, M.; Schirmer, A.; Friederici, A.D.: Accentuation
and emotions – Two different systems? In
ICSA Workshop on Speech and Emotion. Belfast, 2000.
[Alt99] Alter K.; Rank E.; Kotz S.A.; Pfeifer
E.; Besson M.; Friederici A.D.; Matiasek J.: On the relations of semantic and acoustic properties of emotions.
In Proceedings of the 14th
International Conference of Phonetic Sciences (ICPhS-99), San Francisco, California, p.2121,
1999.
[Bez84] Bezooijen, R. Characteristics and Recognizability of Vocal
Expressions of Emotions. Foris publications, Dordrecht Holland/ Cinnaminson
USA, 1984
[Dat64] Davitz, J.R: Auditory
correlates of vocal expression of emotional feeling. In The communication
of emotional meaning, ed J.R. Davitz, 101-112. NewYork: McGraw-Hill, 1964.
[Mar97] Marasek, K. Electroglottographic
Description of Voice Quality. Phonetic AIMS, 1997.
[Min85] Minsky Marvin, The Society of the Mind, 1985
[Oha84] Ohala, J.J. 1984, An Ethological perspective on common
cross-cultural Utilization of F0 of voice. Phonetica 41:1 –16
[Osg57] Osgood, C.E: Suci
J.G: Tannenbaum P.H.: The measurement of
Meaning. University of Illinois Press, 1957
[Pit93] Pittam, J.; Scherer, K. R: Vocal expression and communication of emotion. In M. Lewis and J.
M. Haviland (Eds.), Handbook of emotions (pp.185-198). New York: Guilford
Press. 1993.
[Ro1998] Rosalind Picard: Affective Computing, 1997
[Rod00] Roddy Cowie, Ellen Douglas-Cowie,Susie
Savvidou,Edelle McMahon,Martin Sawey and Marc Schröder, FEELTRACE An lnstrument for
recording perceived emotion in real
time, Queens University Belfast 2000.
[San02] Rocio Santos, Emotion Recognition of Voice signals,
MMI Lab ATCS Stuttgart, 2002
[Tik00] Alison Tickle English
and Japanese Speakers’ emotion vocalization and recognition: A comparison
highlighting vowel quality, 2000
[Tra96] R. L. Trask A Dictionary of phonetics and Phonology.
Routledge, London, 1996.
[Ven96] H.S.Venkatagiri Tutorial on Speech Acoustics, Iowa State
University